 2015, Vol. 73
2015, Vol. 73中国气象学会主办。
文章信息
- 曹春燕, 陈元昭, 刘东华, 李程, 李辉, 贺佳佳. 2015.
- CAO Chunyan, CHEN Yuanzhao, LIU Donghua, LI Cheng, LI Hui, HE Jiajia. 2015.
- 光流法及其在临近预报中的应用
- The optical flow method and its application to nowcasting
- 气象学报, 73(3): 471-480
- Acta Meteorologica Sinica, 73(3): 471-480.
- http://dx.doi.org/10.11676/qxxb2015.034
-
文章历史
- 收稿日期:2014-11-13
- 改回日期:2015-01-19




2. 深圳南方强天气研究重点实验室, 广东 深圳, 518040;
3. 深圳市国家气候观象台, 广东 深圳, 518040
2. Shenzhen Key Laboratory of Severe Weather in South China, Shenzhen Guangdong 518040, China;
3. National Climate Observatory of Shenzhen, Shenzhen Guangdong 518040, China
对流临近预报是指对雷暴及其产生的灾害性对流天气未来几小时的预报。目前业务上使用的0—2 h对流临近预报主要是基于雷达数据的雷暴识别追踪和自动外推预报技术(俞小鼎等,2012)。自动外推技术主要包括两类:交叉相关法(TREC)(Rinehart et al,1978;Wilson et al,1998;陈明轩等,2007)和单体质心法(Crane,1979;Dixon et al,1993;Johnson et al,1993)。单体质心法是将雷暴视为三维单体进行识别、分析、追踪,对雷暴进行拟合外推来做临近预报。交叉相关法利用求雷达回波最优空间的相关,在二维区域内通过计算连续时次雷达回波不同区域的最优空间相关系数,来确定回波在过去的移动矢量特征,建立不同时次雷达回波的最佳拟合关系,从而达到追踪一定区域内雷达回波在过去的移动特征,然后通过这些回波移动特征来外推回波未来的位置和形状。使用交叉相关算法的主要优势在于它的计算方法比较简单。
与单体质心法只能用于对流降水系统相比,交叉相关法既可以跟踪对流降水系统,也可以追踪层状云降水。因此,交叉相关法在气象业务部门得到广泛使用(Rasmussen et al,2001;Mueller et al,2003)。但对局地生成及强度和形状随时间变化很快的降水回波,交叉相关法给出的运动矢量场的质量降低,跟踪失败的情况会显著增加(韩雷等,2008)。交叉相关法有先天缺陷,需要引入新的方法。本研究采用局部约束的光流法计算得到雷达回波的光流场来代替交叉相关法得到的运动矢量场,进行对流天气的临近预报。
光流法是计算机视觉领域中的重要方法,最早由Gibson(1950)提出。光流法具有高弹性、高灵活性等特点,可以模拟出接近理想的运动矢量场,能准确地实现对目标物的识别、追踪和运动估计,被应用于医学、天文、气象等领域(Yilmaz et al,2006)。与传统的交叉相关法相比,光流法立足于变化,而不是选定不变特征再跟踪不变特征移动的方式。将光流法应用于临近预报,开发基于光流法的雷达回波预报产品,不仅可以得到回波的外推预报,还可以弥补传统的雷暴外推方法(交叉相关法)的缺陷,提升临近预报系统的性能。 2 光流法介绍、资料说明及质量控制 2.1 光流法基本原理
光流法的基本原理是由于运动目标和观测器之间的相对运动,以图像亮度变化作为识别对象,在序列图像中产生瞬时位移,体现了图像亮度模式的表观运动。图像中所有像素点的亮度光流就构成了图像的光流场。而光流法的核心就是从连续的图像系列中计算光流场。
简单地说,光流场就是类刚体物体的速度矢量场。速度矢量在气象领域一般用两个分量u,v来表达。假设笛卡尔坐标平面上有一点(x,y),它代表三维空间中某一点(x,y,z)在图像平面上的投影,该点在时刻t的灰度值(光亮度值)为I(x,y,t)。假定该点在(t+Δt)时运动到(x+Δx,y+Δy),在一定时间间隔Δt内灰度值保持不变,即



 =0的展开式,可以简写为
=0的展开式,可以简写为
 式(4)就是光流约束方程。
式(4)就是光流约束方程。
令∇I=(Ix,Iy)T,∇I为图像点灰度的空间梯度;It为灰度随时间的变化率;(u,v)称为光流,图像中所有点的光流就构成了光流场。
从光流的定义(u,v)可以看到,光流场与交叉相关法所求得的运动矢量场在物理意义上是等价的:如果把传感器从摄像机换成多普勒雷达,被探测的目标从一般的运动物体换成雷达回波,则I(x,y,t)就是雷达图像上像素点(x,y)在时刻t的反射率因子值(韩雷等,2008)。因此,可以用光流法替代交叉相关法得到运动矢量场。
由于光流有两个未知变量u和v,而式(4)只有一个光流约束方程。如果不对光流特性做任何假设,则无法同时求出u和v。因此需要引入进一步的约束条件,才能完全确定光流(u,v)。 2.2 Lucas-Kanade法计算光流场
通常光流场计算的约束方法有Lucas等(1981)局部约束和Horn等(1981)全局约束。局部约束方法假定在给定点周围的一个小区域内光流满足一定的条件,而全局约束方法假定光流在整个图像区域范围内满足一定的约束条件。因为临近预报关注回波精细化的局地预报,选定Lucas-Kanade局部约束法作为计算光流的约束条件。
局部平滑约束Lucas-Kanade法的具体算法如下(黄维,2013):假设以P为中心的一个足够小的区域内N个点的光流相同,而且在足够短的时间间隔内,两帧图像间的运动可以近似为线性的。区域内不同的点给予的权重不同,离P点越近,权重越高,光流的计算可转化为


尽管相邻两个时次的雷达回波反射率会随时间变化而发生变化,但在雷达两次体扫的时间间隔6 min内,这种变化可以认为是比较微弱的。因此,可以近似地认为雷达图像满足光流约束方程(4)。在算法中使用一阶差分来代替反射率在各个方向的导数
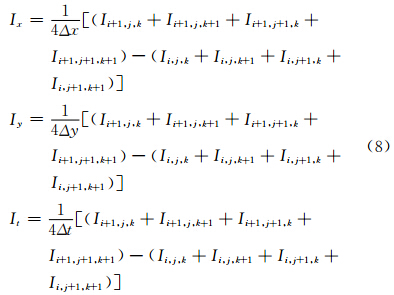
根据式(8)可计算出光流场。由式(8)可知,在计算光流场时既考虑了连续时次回波的变化,也考虑了相邻位置回波的变化。 2.3 资料说明
文中所使用的雷达探测资料为广东省的10部(广州、深圳、阳江、韶关、汕头、梅州、湛江、河源、汕尾、肇庆)新一代S波段多普勒天气雷达(CINRAD/SA)扫描的强度场(反射率因子)拼图资料。在VCP21探测模式下,每隔 6 min对9个仰角进行扫描,雷达最低仰角为0.5°,强度场的最大探测半径为460 km。采用北京敏视达公司的雷达同步控制和数据采集系统时间同步软件进行时间同步,确保所有雷达能同步扫描。为计算方便,把极坐标格式的雷达探测资料用Cressman插值法(李兆芹等,2004)插值到三维直角坐标系中。雷达探测资料经常存在杂波和亮带等虚假回波,而这些虚假回波经常出现在低层,文中取2.5 km高度的雷达CAPPI拼图数据作为雷达回波场。此层雷达回波比较有代表性,能代表对流水平分布特征,并且在很大程度上避免了虚假回波和地物杂波的影响。对回波缺陷的质量控制,采用兰红平等(2009)提出的“膨胀-侵蚀”算法解决。 2.4 质量控制
获得平滑真实的回波光流场是追踪回波移动特征并做好外推临近预报的关键。由于所获得的雷达探测数据包含了雷达真实信号和各种误差噪声等成分,噪声污染对回波算法有很大的影响。利用光流法进行雷达回波移动追踪时,除了要进行上述质量控制外,还需分别进行雷达回波噪声消除的质量控制和光流运动矢量场的优化,以获得更加真实和平滑的雷达回波和光流运动矢量场。2.4.1 雷达回波质量控制——中值滤波
中值滤波是一种非线性平滑技术,是基于排序统计理论的一种能有效抑制雷达回波噪声的非线性信号处理技术。采用中值滤波方法对回波的测量值损失小,平滑的效果好,边沿清晰,对天气雷达数字化回波图作平滑处理是一种切实可行的方法(何建新等,1997)。中值滤波的基本原理是把雷达图像序列中一点的值用该点的一个邻域中各点值的中值代替,让周围的回波强度值更接近真实值,从而消除孤立的噪声点。该方法是用某种结构的二维滑动模板,将板内像素按照像素值的大小进行排序,生成单调上升(或下降)的二维数据序列。
二维中值滤波输出为g(x,y)=med{f(x-k,y-l),(k,l∈w)},其中f(x,y)、g(x,y)分别为原始图像和处理后图像。w为二维模板,通常为2×2,3×3区域,也可以是不同的形状,如线状、圆形、十字形、圆环形等。
2013年4月30日在锋面低槽的影响下,广东出现一次自西北向东南橫扫全省的飑线天气过程。选取该次过程14时(北京时,下同)的回波做中值滤波对比实验。从中值滤波质量控制前后获得的该次过程回波对比(图 1)可以看出,滤波前后飑线的形状、强回波中心以及飑线后的层状云回波大体一致。但中值滤波前(图 1a),飑线回波后部的层状云回波、南端对流回波比较零碎、杂乱。滤波后(图 1b)从视觉效果来看,较好地保留了回波的边缘特征,没有明显失真,而且去噪效果好,图像清晰,达到了较理想的视觉效果,回波变得更平滑、有序,回波边沿清晰。
 |
| 图 1 2013年4月30日14时广东雷达拼图光流法追踪获得的回波(a.中值滤波前,b.中值滤波后)Fig. 1 Radar echo from the Guangdong radar at 14:00 BT 30 April 2013 based on the optical flow method without the median filter(a) and with the median filter(b) |
研究表明,用光流法计算回波的运动矢量时,还必须考虑光流场的噪声情况。如果噪声较强,说明光流场数据本身的置信度较低,需要更多的条件加强光流的约束。根据统计试验,算法对某点与周围若干个点的矢量大小平均值的偏差超过 5 m/s和夹角超过25°的矢量予以剔除。为保证一定范围矢量场的平滑和真实,对于与整个回波区域移动矢量大小的整体平均值相比而言,偏差达到 15 m/s的个别矢量,也被剔除。
2013年3月26日,受锋面低槽影响,华南沿海出现一次强对流天气过程。傍晚前后雷达回波表现为向偏东方向发展和移动。图 2为雷达回波实况及局部约束算法优化前后的运动矢量场。由图 2a可知,算法优化前的运动矢量场能大致反映出回波向偏东方向移动的特征。但在西北和西南部,光流法计算追踪的回波运动矢量场稍显凌乱,与回波移动流场方向存在一定的差异。算法优化后,得到了方向更加一致、更加平滑的回波运动矢量,其与回波向偏东方向移动的特征也更加相符,回波运动矢量与真实的回波运动矢量也更加接近(图 2b)。
 |
| 图 2 2013年3月26日19时局部约束算法优化前(a)和优化后(b)的回波运动矢量场Fig. 2 Echo motion vector field based on the local constraint algorithm at 19:00 BT 26 March 2013 before(a) and after(b)optimization |
利用优化后的局部约束光流法得到的光流场运动矢量场来外推相应区域的回波场,最终可获得整个回波区域的预报图像。 3 临近预报实验 3.1 个例1: 2014年3月31日飑线过程
2014年3月31日,广东省境内出现了一次自西北向东南移动的强飑线过程。飑线31日04时30分前后从广西移入广东,11时前后强回波减弱入海,过程结束,历时超过6 h,几乎横扫广东全省。飑线路径上都记录到8级左右的雷雨大风和短时强降水。广东雷达拼图完整地探测到了这次飑线的演变过程。利用光流法追踪得到的回波外推结果,对这次飑线过程进行外推临近预报试验。
对比这次飑线过程09时06分的实况(图 3a)、09时06分起报的30 min外推预报(图 3b)及30 min后的雷达拼图实况(图 3c)可知,利用光流法跟踪外推算法,30 min外推预报得到的飑线的形状、位置和30 min后雷达观测到的实况比较接近。系统较好地预报出了中段、东段的弓形回波及西端的强回波。当然,比较图 3b、3c也可以看出,飑线东北段的移动速度偏慢。这主要是由于光流算法得到的回波移动矢量在飑线的东北部偏小的缘故。
 |
| 图 3 光流法对2014年3月31日飑线过程反射率因子拼图 09时06分实况(a)09时06分的30 min外推预报(b)及30 min后09时36分雷达回波实况(c)Fig. 3 Observation from the Guangdong radar at 09:06 BT(a),and the 30 min forecast echo at 09:06 BT(b)31 March 2014 based on the optical flow method as well as the observation 30 min late from the Guangdong radar at 09:36 BT(c) |
对比预报和实况可知,光流法基本预报出了30 min后飑线最大反射率因子特征的位置。实况飑线上的强中心主要分布在西端、中段和东段:西端主要为强单体风暴,最强回波约50 dBz,中段和东段为弓形回波,最强回波约为40 dBz。预报30 min后的强回波中心也主要在西端、中段和东段,西端和东段的最强回波比实况偏强,中段相当。但算法预报的飑线东北段强度明显比实况强。09时36分,实况上东北段的飑线已经明显减弱,呈现层状云降水特征,而预报该段仍为强弓形回波。事实上09时36分后飑线东北部已经开始减弱,向普通对流或层状回波演变。由于基于光流法的外推预报没有考虑回波强度变化,光流法也几乎不太可能预报雷暴回波的增长和消散。但一般情况下在30 min的短时间内,飑线的反射率因子不会发生非常明显变化。所以,光流法对飑线特征的外推预报在业务中还是有一定指导意义的。
从本次过程1 h预报以及1 h后的飑线实况的对比可知,预报1 h后飑线位置与回波实况比较一致,形状也与实况比较接近。利用光流法对组织性比较强的对流系统如飑线的1 h外推预报也有一定的参考价值(图略)。 3.2 个例2: 2014年9月16日台风“海鸥”过程
台风“海鸥”2014年9月12日在菲律宾以东洋面生成,之后向西北偏西移动,横过南海中北部,于9月16日10时在海南省东北部文昌沿海地区登陆。
在16日10时36分雷达探测的回波实况拼图(图 4a)上可以看到,台风眼区的回波是闭合的,眼区半径大约 50 km。眼区外是大范围的螺旋雨带。在台风中心附近,眼墙区域有3个高值回波区,分别位于台风眼的南侧、西北侧和东北侧。其中,南侧的强回波区覆盖了第三象限和部分第四象限,西北侧的强回波区覆盖了第二象限,东北侧的强回波覆盖了第一象限和部分第四象限,它由台风东南侧眼墙与螺旋雨带共同构成。这3个区域的回波强度都在30 dBz以上,最大值超过40 dBz。在台风中心东北侧眼墙区域以北约150 km处有一条偏东西向的回波带,中心强度在40 dBz左右。在眼墙区的外围,台风的东到东北侧,由内向外依次大致还有4条东南—西北向带状回波,回波强度超过40 dBz,在这些区域也有较强的积云对流发展,雨带呈长条带状,主要与台风外围云系有关。
 |
| 图 4 光流法对2014年9月16日台风“海鸥”过程的反射率因子拼图实况和预报(a. 10时36分实况,b. 10时06分的30 min外推预报,c. 11时06分实况,d. 10时06分的1 h外推预报)Fig. 4 Observation from the Guangdong radar at 09:36 BT 16 September 2014(a),30 min forecast echo at 09:06 BT(b)based on the optical flow method,the observation from the Guangdong radar at 11:06 BT 16 September 2014(c),and the 60 min forecast echo at 10:06 BT(d)based on the optical flow method |
从10时06分的30 min外推预报(图 4b)可以看出,台风眼清晰,大小和实况相当,眼墙区域螺旋雨带与雷达探测实况资料接近,只是强回波区范围稍大。与实况相似,预报的台风眼壁较强的对流发生在第一、第二和第三象限。眼墙区域在东北、西北和西南侧有高回波中心,回波强度超过30 dBz。眼墙区域北侧预报了东西向回波。同样在外围预报出4条东南—西北走向的长条形回波带。预报的回波和实况相比,强度大致相当,但范围稍偏大。以上分析可知预报的台风螺旋雨带和外围对流整体分布形势以及位置与30 min后的实况均比较接近。
对台风“海鸥”进行了1 h外推预报试验。从10时06分的1 h外推预报(图 4d)以及1 h后的实况(图 4c)可见,预报1 h后台风的螺旋雨带和外围雨带与实况比较一致,大体形状也与实况比较接近。光流法在反演和追踪热带气旋的螺旋雨带是可行的。 3.3 个例3: 2014年5月20日强降水过程
2014年5月20日中午,珠江口东侧地区呈东西向的对流缓慢东移并减弱,珠江口西侧一条近似南北向的弓形回波以较快的速度东移,在向东移动的过程中,追上东侧的回波。两条回波合并后,强度和范围迅速加大,最后发展成为倒“Y”字形的强回波。这次对流过程给珠三角部分地区造成了局地的强降水和短时雷雨大风。
对比光流法对这次强降水过程雷达反射率因子拼图 14时的实况(图 5a)、在14时的30 min外推预报(图 5b)及14时30分雷达回波实况(图 5c)表明,光流法预报出两条回波合并后强度加强,预报的30 min后回波的位置与实况基本相符,也基本预报出了回波的加强及倒“Y”字形结构,只是西南部的回波预报比实况偏弱。
 |
| 图 5 光流法对2014年5月20日强降水过程反射率因子拼图 14时实况(a),14时的30 min外推预报(b)及14时30分雷达回波实况(c)Fig. 5 Observation from the Guangdong radar at 14:00 BT(a) and the 30 min forecast echo at 14:00 BT(b)based on the optical flow method as well as the observation 30 min late from the Guangdong radar at 14:30 BT(c)20 May 2014 |
2014年5月10日上午,珠江口西侧沿海地区有回波生成。回波生成后其位置基本维持在珠江口西侧沿海少动。在β中尺度辐合线作用下,雷达回波不断生成加强,回波也由块状逐渐向带状降水回波调整。由于强降水系统的长时间维持,上述地区出现暴雨到大暴雨。
图 6为光流法对本次强降水过程反射率因子拼图外推实验。开始时间为11时,外推30 min的预报。从外形上看,预报的11时30分珠江口西侧回波东段和实况比较接近,西段回波位置和实况有偏离。强度上光流法预报出了东段的大部分强回波,但由于预报位置偏离,没有预报出西段回波。
 |
| 图 6 光流法对2014年5月10日强降水过程反射率因子拼图在11时的实况(a)和30 min外推预报(b)以及11时30分雷达回波实况(c)Fig. 6 Observation from the Guangdong radar at 11:00 BT(a) and the 30 min forecast echo at 11:00 BT(b)based on the optical flow method and the observation from the Guangdong radar at 11:30 BT(c)10 May 2014 |
通过对4次天气个例的实验,对光流法在对流临近预报中的效果进行了检验评估。从实验结果分析看,大部分强对流天气过程该算法可以预报出未来30、60 min内雷暴的回波特征、形状及位置。光流法对对流天气过程雷达回波的外推预报具有一定的效果,30、60 min的预报结果对业务有一定的指导意义。但是,预报与实况还存在一定的差异,主要表现在回波的形状上。4 光流法和交叉相关法结果的对比及评价
目前,光流法已开发为可以进行自动和实时临近预报的软件模块,与基于交叉相关算法的对流分析和临近预报的算法相配合,对广东地区出现的对流天气过程进行实时临近预报。算法以广东省内10部雷达的体扫基数据拼图后的雷暴特征分析结果为基础,滚动进行60 min内间隔6 min的对流临近预报。在得到全省雷达基数据后,启动基数据的预处理,进行雷达拼图、质量控制程序,算法运行。运算完成后,即可显示分析和预报结果。程序在Linux 操作系统环境服务器上运行,每个CPU至少有4个核。测试结果表明,每个流程所有程序在接收到雷达资料后2 min内全部完成。因此,该算法在时间上完全可以作实时预报工具。
为了对光流法和交叉相关法预报结果进行评价,分别将预报的回波和对应时刻的实况位置投影到1 km×1 km的格点上,然后进行逐个格点的对比。规定如果格点上实况出现回波,预报也出现回波,则判断为该点成功;如果格点上实况出现回波,预报没有出现回波,则判断该点失败;如果格点上实况没有出现回波,预报出现回波,则判断该点虚警。击中率(POD)、虚警率(FAR)和临界成功指数(CSI)分别按以下公式计算:



击中率反映命中的预报正确的格点占总格点的概率,值越大越好;虚警率用于衡量空报的概率,值越小越好;临界成功指数值越大越好。
选取8个发生在广东省的天气个例(表 1),主要为锋面低槽降水、热带系统降水、移动型回波局地加强降水、准静止型回波局地加强降水。对这些过程分别使用光流法和交叉相关法进行了30和60 min 回波位置的预报。图 7为锋面低槽降水、热带系统降水、移动型的回波局地加强、准静止型回波局地加强降水的击中率、虚警率和临界成功指数试验结果的平均值。从图 7可以看到,对于锋面低槽系统带来的降水天气过程,光流法效果优于交叉相关算法,对30 min的预报评价结果,光流法的击中率平均值比交叉相关法高3个百分点,临界成功指数平均比交叉相关法高6个百分点,60 min的预报 评价结果和30 min相似。对热带系统带来的降水天气个例,交叉相关法略胜光流法,但两者的效果差别不是太大。而移动型局地加强的对流降水过程,光流法效果优于交叉相关法,30 min的预报评价结果看,光流法的击中率平均值比交叉相关法高7个百分点,临界成功指数平均也比交叉相关法高7个百分点,60 min的预报评价结果光流法效果也明显优于交叉相关法。移动型的分散多单体和超级单体结果和移动型局地加强的对流降水类似。雷暴变化速度较快时,光流法能计算出回波的运动矢量场;而交叉相关法可能因为相关系数太小而被剔除,无法得到该范围内准确的运动矢量场,从而导致两种预报结果的差异。准静止型局地加强型降水,光流法30、60 min的击中率平均值约为62%和53%,分别比上述3种类型低8—10个百分点,说明该算法仍存在一定局限性,但效果仍优于交叉相关法。
| 个例日期 | 天气类型 |
| 2014年3月30日 | 锋面低槽降水 |
| 2014年5月11日 | 锋面低槽降水 |
| 2014年5月17日 | 西南季风降水 |
| 2014年6月3日 | 西南季风降水 |
| 2014年5月20日 | 回波局地加强降水(移动型) |
| 2014年8月1日 | 回波局地加强降水(移动型) |
| 2014年5月10日 | 回波局地加强降水(准静止型) |
| 2014年8月7日 | 回波局地加强降水(准静止型) |
 |
| 图 7 光流法和交叉相关法预报试验结果的击中率、虚警率和临界成功指数对比(a.锋面低槽降水,b.西南季风降水,c.移动型回波局地加强降水,d.准静止型回波局地加强降水)Fig. 7 Experimental results in terms of POD,FAR and CSI(a. frontal low trough rainfall,b. southwest monsoon rainfall,c. echo local strengthening precipitation(mobile type),d. echo local strengthening one(quasi-stationary type)) |
另外,从试验结果还可以看出,无论是光流法,还是交叉相关法,击中率和临界成功指数都随着预报时效的加长而减小,而虚警率则随着预报时效的加长而增大。说明光流法和交叉相关法外推预报的可用性是随着时间的延长而降低。这是因为目前外推预报还无法从物理机制上预报雷暴的生成、发展和消亡。5 结 论
文中介绍了光流法的基本原理,在对雷达拼图进行了中值滤波等质量控制,对算法进行加强约束等优化处理后,利用光流法得到的运动矢量场来外推雷达回波做预报。通过对4种天气个例的实验,对光流法在对流临近预报中的效果进行了检验评估。还对光流法和交叉相关法预报结果进行了对比评价。
(1)对雷达资料进行的中值滤波等质量控制,有效地抑制了噪声的影响,得到了较平滑、真实的雷达回波。对2013年4月30日的雷达回波利用中值滤波等质量控制前后回波实况的对比结果表明,进行上述一系列的质量控制后,回波的平滑效果好,边沿清晰,回波质量明显改善,获得了比较真实的雷达回波。
(2)对局部约束的光流法得到的光流场加入了更多的光流约束条件优化后,能够获得方向更加一致、更加平滑的回波运动矢量。利用这些运动矢量场来外推相应区域的回波场,可以获得回波的预报图像。通过对2014年夏季发生在广东珠三角地区的4个个例(包括1次飑线过程、1次台风过程和2次强降水过程)的外推临近预报试验。结果表明,光流法对对流天气过程雷达回波的外推预报具有一定的效果,算法给出的30、60 min雷达回波的位置以及形状的外推预报具有较好的业务指示意义。
(3)通过对光流法和交叉相关法预报结果的定量对比评价表明:对移动型局地生成及强度和形状随时间变化很快的雷暴及锋面低槽,光流法效果优于交叉相关算法。光流法的优势在于,即使雷暴的运动和外形变化比较剧烈,也能准确地得到雷暴的整体运动趋势,这是交叉相关法无法相比的。而对热带系统降水天气,交叉相关法略优于光流法。对准静止型局地加强型降水,光流法效果优于交叉相关法,但预报效果较低,说明该算法仍存在一定的局限性。对光流法和交叉相关法外推预报的可用性随着时间的延长而降低。
与传统的交叉相关法相比,光流法立足于变化,而不是选定不变特征再跟踪不变特征移动的方式。在计算光流场时考虑了回波在时间空间上的变化。因此,光流法对30或 60 min的临近预报预警有一定的帮助,也可以弥补传统的交叉相关法的缺陷,提升临近预报系统的性能,有很大的应用推广价值。
| 陈明轩, 王迎春, 俞小鼎. 2007. 交叉相关外推算法的改进及其在对流临近预报中的应用. 应用气象学报, 18(5): 690-701. Chen M X, Wang Y C, Yu X D. 2007. Improvement and application test of TREC algorithm for convective storm nowcast. J Appl Meteor Sci, 18(5): 690-701 (in Chinese) |
| 韩雷, 王洪庆, 林隐静. 2008. 光流法在强对流天气临近预报中的应用. 北京大学学报(自然科学版), 44(5): 751-755. Han L, Wang H Q, Lin Y J. 2008. Application of optical flow method to nowcasting convective weather. Acta Scient Natur Univ Pekin, 44(5): 751-755 (in Chinese) |
| 何建新, 王中科, 王永丽. 1997. 天气雷达数字化回波图的平滑处理. 成都气象学院学报, 12(1): 65-70. He J X, Wang Z K, Wang Y L. 1997. Smooth processing digital echo of weather radar. J Chengdu Inst Meteor, 12(1): 65-70 (in Chinese) |
| 黄维. 2013. 江淮流域夏季局地强降水预警预报方法研究[D]. 南京: 南京信息工程大学, 28-30. Huang W. 2013. The investigation of warning and forecasting methods for local region in the summer of Huaihe River [D]. Nanjing: Nanjing University of Information Science and Technology, 28-30 (in Chinese) |
| 兰红平, 孙向明, 梁碧玲等. 2009. 雷暴云团自动识别和边界相关追踪技术研究. 气象, 35(7): 101-111. Lan H P, Sun X M, Liang B L, et al. 2009. An automatic tracking and recognition algorithm for thunderstorm cloud-cluster (TRACER). Meteor Mon, 35(7): 101-111 (in Chinese) |
| 李兆芹, 姚益平, 姚克敏. 2004. NCEP/NCAR再分析温度资料在农业气象中的应用可行性. 南京气象学院学报, 27(3):420-427. Li Z Q, Yao Y P, Yao K M. 2004. Feasibility of the application of NCEP/NCAR reanalysis temperature data to agricultural meteorology research. J Nanjing Ins Meteor, 27(3):420-427 (in Chinese) |
| 俞小鼎, 周小刚, 王秀明. 2012. 雷暴与强对流临近天气预报技术进展. 气象学报, 70(3): 311-337. Yu X D, Zhou X G, Wang X M. 2012. The advance of the nowcasting techniques. Acta Meteor Sinica, 70(3): 311-337 (in Chinese) |
| Crane R K. 1979. Automatic cell detection and tracking. IEEE Trans Geosci Electron, 17(4): 250-262 |
| Dixon M, Wiener G. 1993. TITAN: Thunderstorm identification, tracking, analysis, and nowcasting: A radar-based methodology. J Atmos Oceanic Technol, 10(6): 785-797 |
| Gibson J J. 1950. The Ecological Approach to Visual Perception. Boston: Houghton Mifflin, 332pp |
| Horn B K P, Schunk B G. 1981. Determing optical flow. Artif Intell, 17(1-3): 185-203 |
| Johnson J T, MacKeen P L, Witt A, et al. 1998. The storm cell identification and tracking algorithm: An enhanced WSR-88D algorithm. Wea Forecasting, 13(2): 263-276 |
| Lucas B D, Kanade T. 1981. An iterative image registration technique with an application to stereo vision //Proceedings of the 7th International Join Conference on Articial Intelligence, 2: 121-130 |
| Mueller C, Saxen T, Roberts R, et al. 2003. NCAR auto-nowcast system. Wea Forecasting, 18(4): 545-561 |
| Rasmussen R, Dixon M, Hage F, et al. 2001. Weather Support to Deicing Decision Making (WSDDM): A winter weather nowcasting system. Bull Amer Meteor Soc, 82(4): 579-595 |
| Rinehart R E, Garvey E T. 1978. Three-dimensional storm motion detection by conventional weather radar. Nature, 273(5660): 287-289 |
| Wilson J W, Crook N A, Mueller C K, et al. 1998. Nowcasting thunderstorms: A status report. Bull Amer Meteor Soc, 79(10): 2079-2099 |
| Yilmaz A, Javed O, Shah M. 2006. Object tracking: A survey. ACM Comput Surv, 38(4): 1-45 |